Publications
See google scholar for the most up-to-date list.
2023


2022
-
-
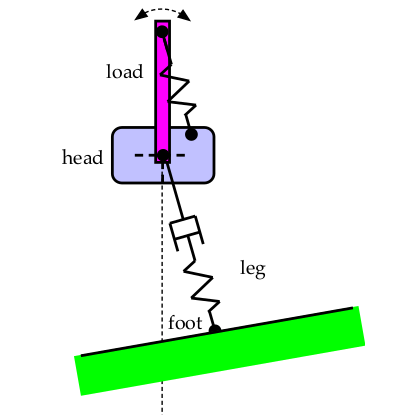
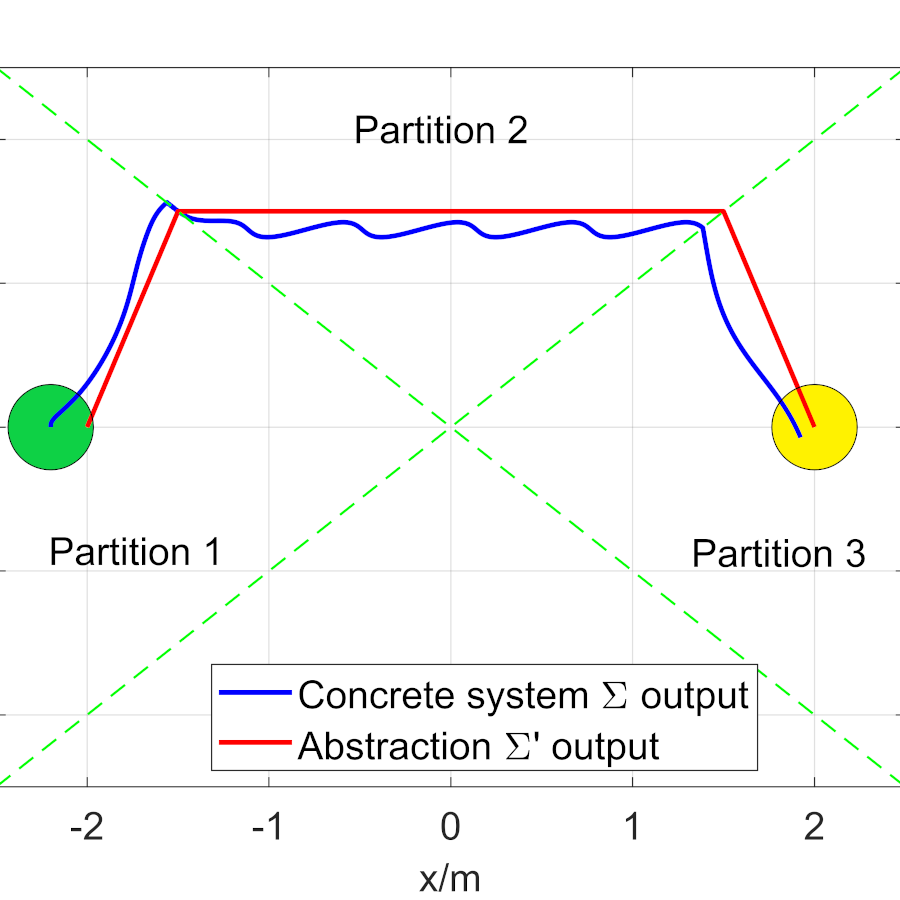 Robust Approximate Simulation for Hierarchical Control of Piecewise Affine Systems under Bounded DisturbancesAmerican Control Conference (ACC), 2022
Robust Approximate Simulation for Hierarchical Control of Piecewise Affine Systems under Bounded DisturbancesAmerican Control Conference (ACC), 2022





2021
-
 A More Scalable Mixed-Integer Encoding for Metric Temporal LogicIEEE Control Systems Letters (L-CSS), 2021
A More Scalable Mixed-Integer Encoding for Metric Temporal LogicIEEE Control Systems Letters (L-CSS), 2021 -
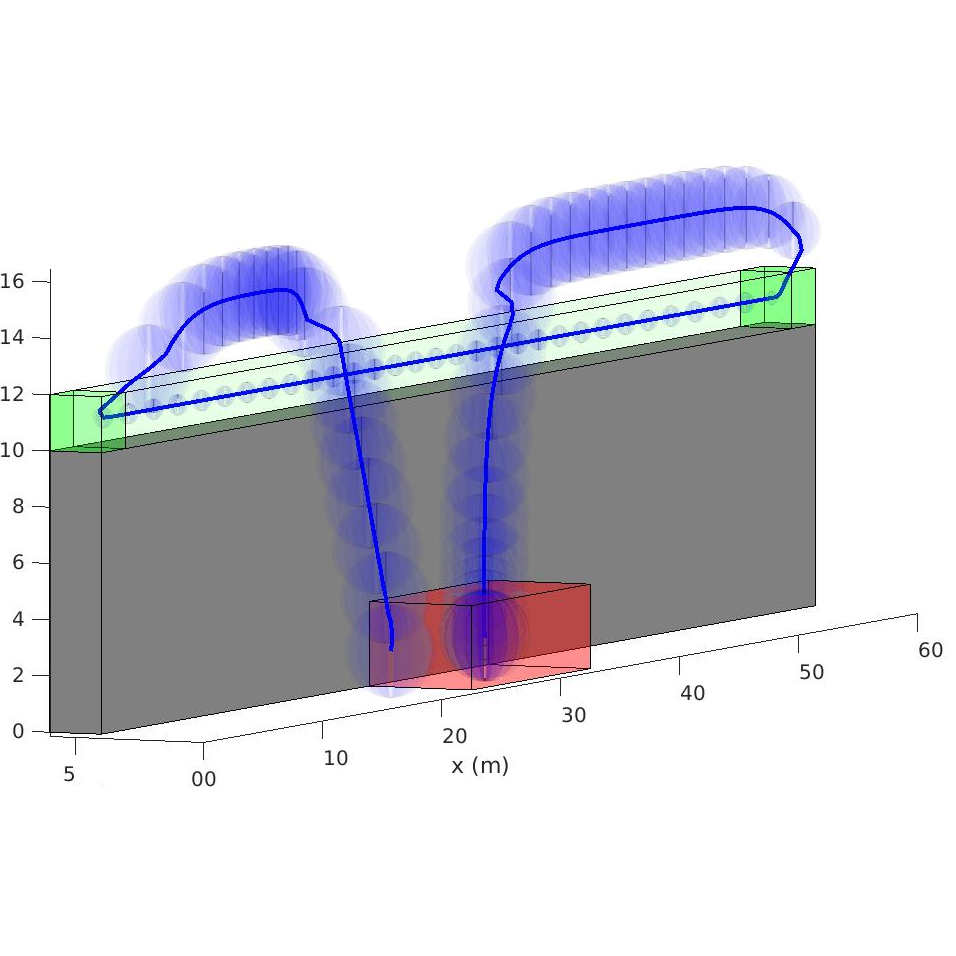
 Automatic Trajectory Synthesis for Real-Time Temporal LogicIEEE Transactions on Automatic Control (TAC), 2021
Automatic Trajectory Synthesis for Real-Time Temporal LogicIEEE Transactions on Automatic Control (TAC), 2021 -
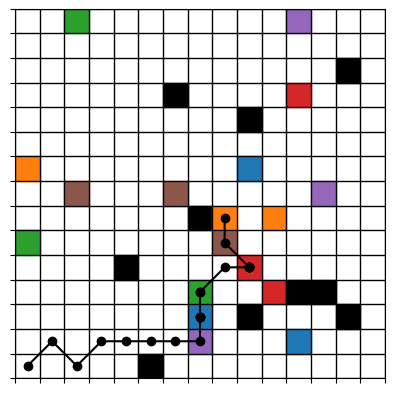
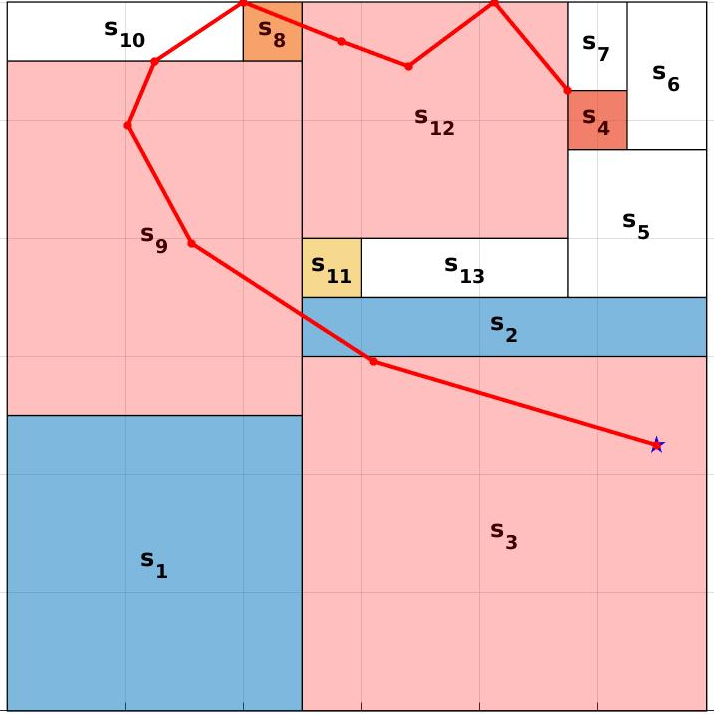
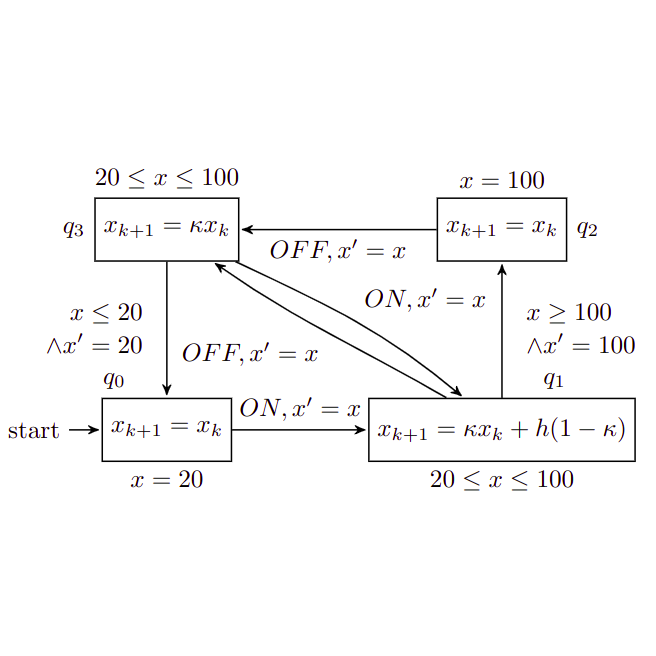 Symbolic Control of Hybrid Systems from Signal Temporal Logic SpecificationsGuidance, Navigation and Control, 2021
Symbolic Control of Hybrid Systems from Signal Temporal Logic SpecificationsGuidance, Navigation and Control, 2021




2020
-
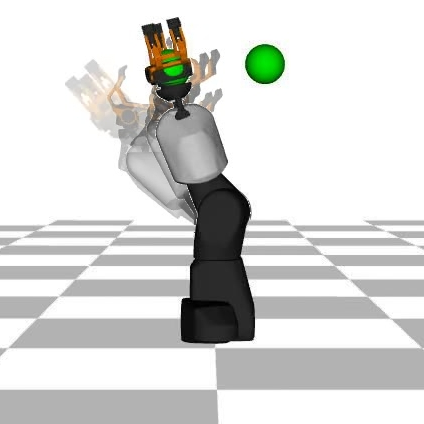 Trajectory Optimization for High-Dimensional Nonlinear Systems Under STL SpecificationsIEEE Control Systems Letters (L-CSS), 2020
Trajectory Optimization for High-Dimensional Nonlinear Systems Under STL SpecificationsIEEE Control Systems Letters (L-CSS), 2020 -
 Robust Approximate Simulation for Hierarchical Control of Linear Systems under DisturbancesAmerican Control Conference (ACC), 2020
Robust Approximate Simulation for Hierarchical Control of Linear Systems under DisturbancesAmerican Control Conference (ACC), 2020




2019
-
 Active Perception and Control From Temporal Logic SpecificationsIEEE Control Systems Letters (L-CSS), 2019
Active Perception and Control From Temporal Logic SpecificationsIEEE Control Systems Letters (L-CSS), 2019



2017
-
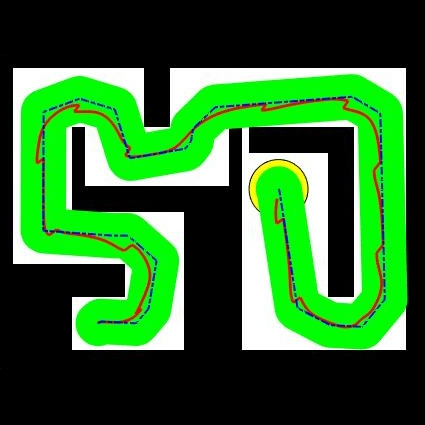
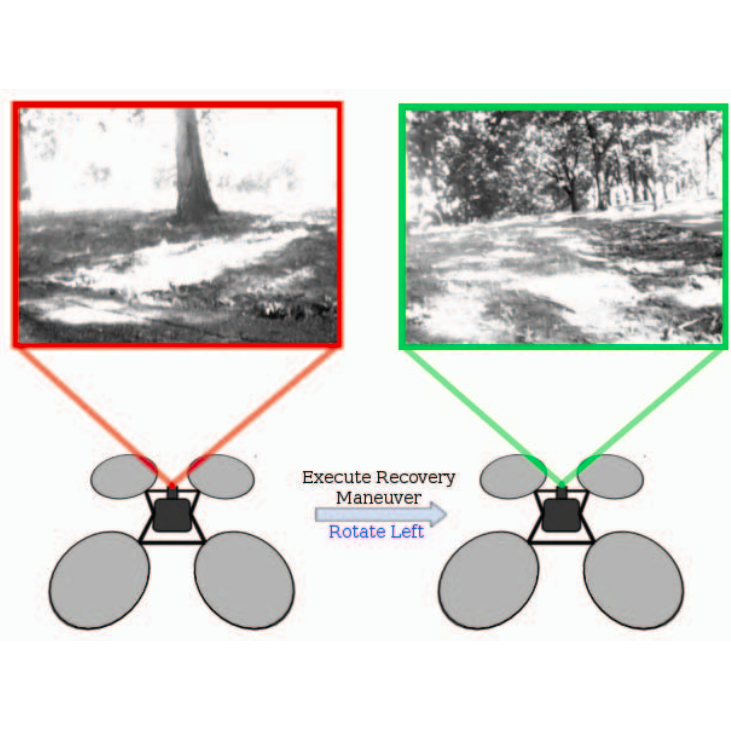 Learning Robust Failure Response for Autonomous Vision-Based FlightInternational Conference on Robotics and Automation (ICRA), 2017
Learning Robust Failure Response for Autonomous Vision-Based FlightInternational Conference on Robotics and Automation (ICRA), 2017
