Vince Kurtz
Assistant Professor, DePaul University (Chicago, IL)

Hi, I’m Vince! I’m an an assistant professor at DePaul’s School of Computing. I develop control, simulation, and learning algorithms for robotics, with the long-term goal of enabling new tools that amplify human capabilities.
I previously worked on the Large Behavior Models team at Toyota Research Institute, as a research scientist in the Burdick group at Caltech, and as a postdoc in Caltech’s AMBER lab. From 2017-2023 I was a PhD student in the DISCOVER lab at Notre Dame. Before grad school, I studied physics and violin performance at Goshen College.
Prospective Students: We’re always looking for curious, highly-motivated student researchers at the undergraduate, masters, and PhD levels. See details here.
News
| Jul 17, 2026 | I’ll be talking about hydrax at the RSS workshop on Sampling-based Optimization for Robotics in Sydney |
|---|---|
| Jan 16, 2026 | Gave a seminar talk on Simulation-Driven Generative Control at Georgia Tech - thanks to the LIDAR group for the invitation and engaging discussion! |
| Sep 17, 2025 | I’ll be giving a talk on my research at the Rice University Mechanical Engineering seminar series |
| Jun 21, 2025 | Our joint work with NASA-JPL won the Best Paper Award at the RSS Workshop on Reliable Robotics! |
| Feb 22, 2025 | I’m excited to announce that I’ll be joining DePaul University’s School of Computing as an Assistant Professor in January 2026! |
Recent Publications
-
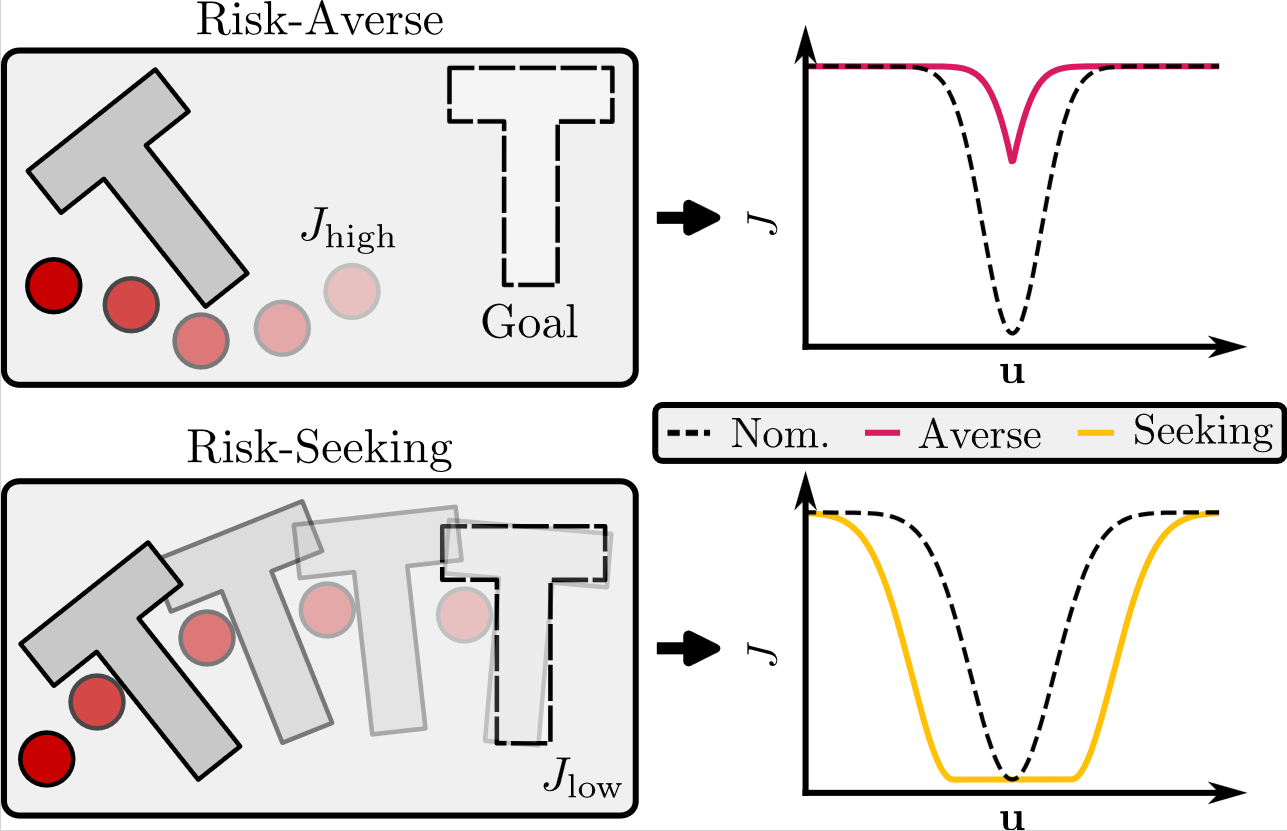
 Risk-Guided Diffusion: Toward Deploying Robot Foundation Models In Space, Where Failure Is Not An OptionIn RSS 2025 Workshop on Reliable Robotics: Safety and Security in the Face of Generative AI, 2025
Risk-Guided Diffusion: Toward Deploying Robot Foundation Models In Space, Where Failure Is Not An OptionIn RSS 2025 Workshop on Reliable Robotics: Safety and Security in the Face of Generative AI, 2025