My research focuses on planning, simulation, and control of high-degree-of-freedom robots. I’m particularly interested in techniques that enable safe and reliable contact-rich interactions with the environment, as well as methods that generalize across legged locomotion and dexterous manipulation tasks.
For the most up-to-date publication list, see google scholar.
2025
-
CENIC: Convex Error-controlled Numerical Integration for Contact
Vince Kurtz, and Alejandro Castro
arXiv preprint, 2025
-
Risk-Guided Diffusion: Toward Deploying Robot Foundation Models In Space, Where Failure Is Not An Option
Rohan Thakker, Adarsh Patnaik, Vince Kurtz , and 10 more authors
In RSS 2025 Workshop on Reliable Robotics: Safety and Security in the Face of Generative AI , 2025
-
Generative Predictive Control: Flow Matching Policies for Dynamic and Difficult-to-Demonstrate Tasks
Vince Kurtz, and Joel W Burdick
arXiv preprint, 2025
-
DROP: Dexterous Reorientation via Online Planning
Albert H Li, Preston Culbertson, Vince Kurtz , and 1 more author
In International Conference on Robotics and Automation (ICRA) , 2025
-
Reduced-Order Model Guided Contact-Implicit Model Predictive Control for Humanoid Locomotion
Sergio A Esteban, Vince Kurtz, Adrian B Ghansah , and 1 more author
In International Conference on Robotics and Automation (ICRA) , 2025
-
Equality Constrained Diffusion for Direct Trajectory Optimization
Vince Kurtz, and Joel W Burdick
In American Control Conference (ACC) , 2025
2024
-
Supervised Learning for Stochastic Optimal Control
Vince Kurtz, and Joel W Burdick
In Conference on Decision and Control (CDC) , 2024
2023
-
Inverse Dynamics Trajectory Optimization for Contact-Implicit Model Predictive Control
Vince Kurtz, Alejandro Castro, Aykut Özgün Önol , and 1 more author
arXiv preprint, 2023
-
Temporal Logic Motion Planning with Convex Optimization via Graphs of Convex Sets
Vince Kurtz, and Hai Lin
IEEE Transactions on Robotics (T-RO), 2023
-
Scalable Autonomy for High-Degree-of-Freedom Robots
Vince Kurtz
University of Notre Dame , 2023
2022
-
Mixed-Integer Programming for Signal Temporal Logic with Fewer Binary Variables
Vince Kurtz, and Hai Lin
IEEE Control Systems Letters (L-CSS), 2022
-
-
Mini Cheetah, the Falling Cat: A Case Study in Machine Learning and Trajectory Optimization for Robot Acrobatics
Vince Kurtz, He Li, Patrick M. Wensing , and 1 more author
In International Conference on Robotics and Automation (ICRA) , 2022
-
Learning to Control Robot Hopping over Uneven Terrain
Michael Lemmon, Patrick M. Wensing, Vince Kurtz , and 1 more author
In American Control Conference (ACC) , 2022
-
Robust Approximate Simulation for Hierarchical Control of Piecewise Affine Systems under Bounded Disturbances
Zihao Song, Vince Kurtz, Shirantha Welikala , and 2 more authors
In American Control Conference (ACC) , 2022
2021
-
A More Scalable Mixed-Integer Encoding for Metric Temporal Logic
Vince Kurtz, and Hai Lin
IEEE Control Systems Letters (L-CSS), 2021
-
Automatic Trajectory Synthesis for Real-Time Temporal Logic
Rafael Rodrigues Silva, Vince Kurtz, and Hai Lin
IEEE Transactions on Automatic Control (TAC), 2021
-
Symbolic Control of Hybrid Systems from Signal Temporal Logic Specifications
Rafael Rodrigues Silva, Vince Kurtz, and Hai Lin
Guidance, Navigation and Control, 2021
-
Control Barrier Functions for Singularity Avoidance in Passivity-Based Manipulator Control
Vince Kurtz, Patrick M. Wensing, and Hai Lin
In Conference on Decision and Control (CDC) , 2021
2020
-
Approximate Simulation for Template-Based Whole-Body Control
Vince Kurtz, Patrick M. Wensing, and Hai Lin
IEEE Robotics and Automation Letters (RA-L), 2020
-
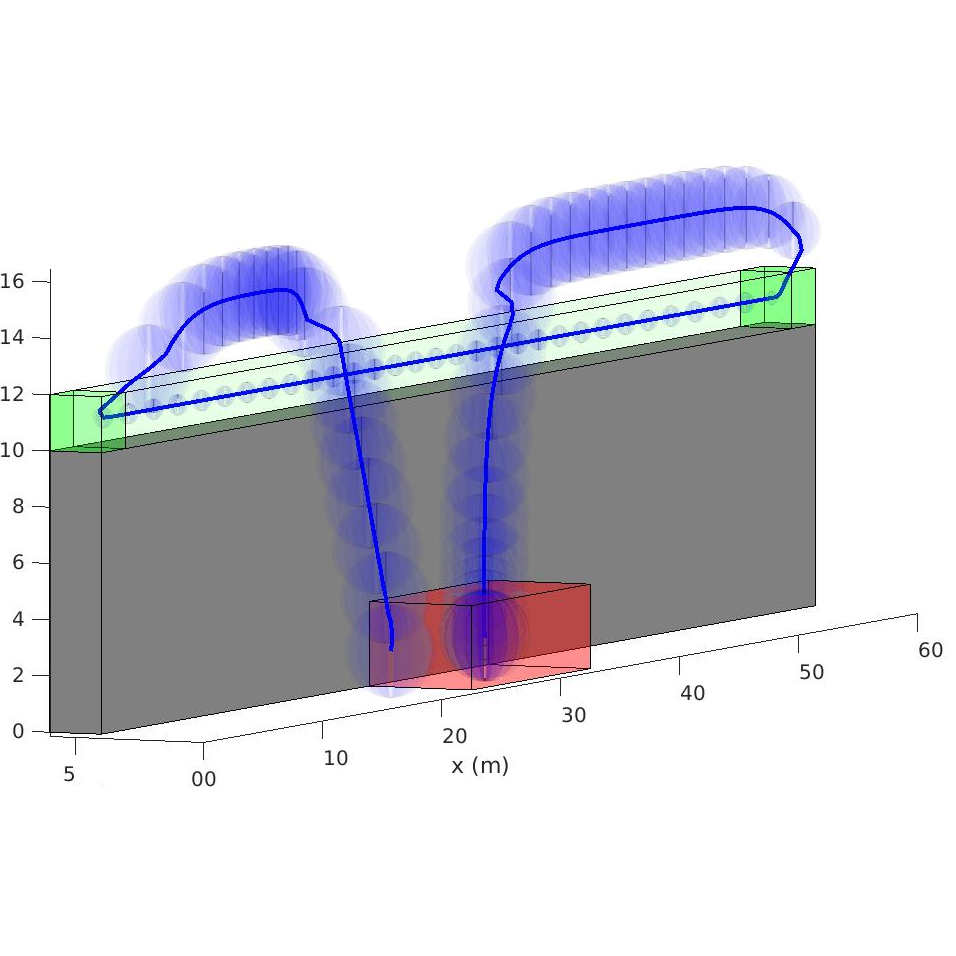
Trajectory Optimization for High-Dimensional Nonlinear Systems Under STL Specifications
Vince Kurtz, and Hai Lin
IEEE Control Systems Letters (L-CSS), 2020
-
A Smooth Robustness Measure of Signal Temporal Logic for Symbolic Control
Yann Gilpin, Vince Kurtz, and Hai Lin
IEEE Control Systems Letters (L-CSS), 2020
-
Robust Approximate Simulation for Hierarchical Control of Linear Systems under Disturbances
Vince Kurtz, Patrick M. Wensing, and Hai Lin
In American Control Conference (ACC) , 2020
2019
-
Active Perception and Control From Temporal Logic Specifications
Rafael Rodrigues Silva, Vince Kurtz, and Hai Lin
IEEE Control Systems Letters (L-CSS), 2019
-
-
Toward Verifiable Real-Time Obstacle Motion Prediction for Dynamic Collision Avoidance
Vince Kurtz, and Hai Lin
In American Control Conference (ACC) , 2019
2017
-
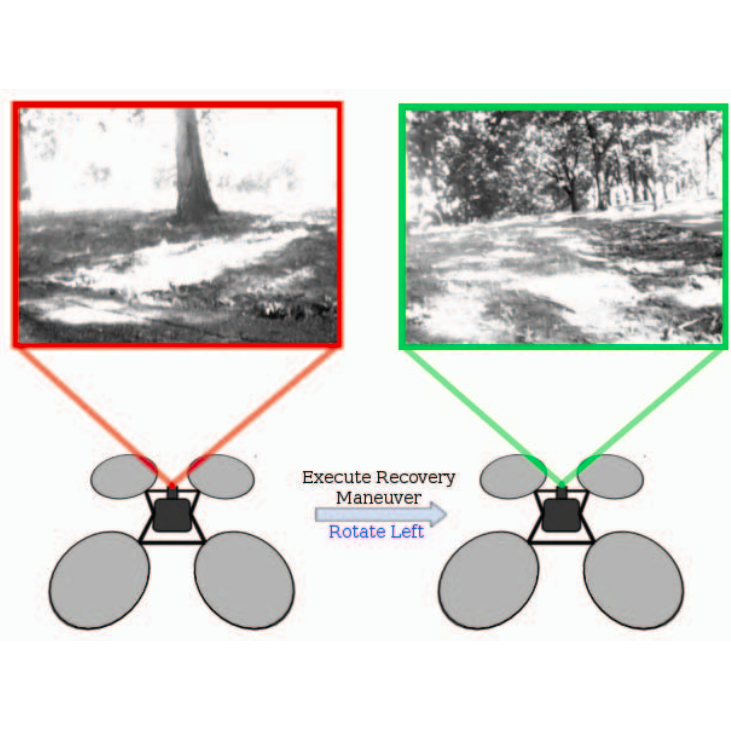
Learning Robust Failure Response for Autonomous Vision-Based Flight
Dhruv Mauria Saxena, Vince Kurtz, and Martial Hebert
In International Conference on Robotics and Automation (ICRA) , 2017
 Risk-Guided Diffusion: Toward Deploying Robot Foundation Models In Space, Where Failure Is Not An OptionIn RSS 2025 Workshop on Reliable Robotics: Safety and Security in the Face of Generative AI , 2025
Risk-Guided Diffusion: Toward Deploying Robot Foundation Models In Space, Where Failure Is Not An OptionIn RSS 2025 Workshop on Reliable Robotics: Safety and Security in the Face of Generative AI , 2025 Equality Constrained Diffusion for Direct Trajectory OptimizationIn American Control Conference (ACC) , 2025
Equality Constrained Diffusion for Direct Trajectory OptimizationIn American Control Conference (ACC) , 2025





 Supervised Learning for Stochastic Optimal ControlIn Conference on Decision and Control (CDC) , 2024
Supervised Learning for Stochastic Optimal ControlIn Conference on Decision and Control (CDC) , 2024


 Learning to Control Robot Hopping over Uneven TerrainIn American Control Conference (ACC) , 2022
Learning to Control Robot Hopping over Uneven TerrainIn American Control Conference (ACC) , 2022 Robust Approximate Simulation for Hierarchical Control of Piecewise Affine Systems under Bounded DisturbancesIn American Control Conference (ACC) , 2022
Robust Approximate Simulation for Hierarchical Control of Piecewise Affine Systems under Bounded DisturbancesIn American Control Conference (ACC) , 2022




 A More Scalable Mixed-Integer Encoding for Metric Temporal LogicIEEE Control Systems Letters (L-CSS), 2021
A More Scalable Mixed-Integer Encoding for Metric Temporal LogicIEEE Control Systems Letters (L-CSS), 2021 Automatic Trajectory Synthesis for Real-Time Temporal LogicIEEE Transactions on Automatic Control (TAC), 2021
Automatic Trajectory Synthesis for Real-Time Temporal LogicIEEE Transactions on Automatic Control (TAC), 2021 Symbolic Control of Hybrid Systems from Signal Temporal Logic SpecificationsGuidance, Navigation and Control, 2021
Symbolic Control of Hybrid Systems from Signal Temporal Logic SpecificationsGuidance, Navigation and Control, 2021



 Trajectory Optimization for High-Dimensional Nonlinear Systems Under STL SpecificationsIEEE Control Systems Letters (L-CSS), 2020
Trajectory Optimization for High-Dimensional Nonlinear Systems Under STL SpecificationsIEEE Control Systems Letters (L-CSS), 2020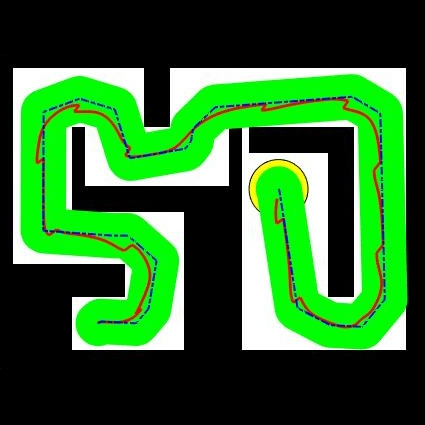 Robust Approximate Simulation for Hierarchical Control of Linear Systems under DisturbancesIn American Control Conference (ACC) , 2020
Robust Approximate Simulation for Hierarchical Control of Linear Systems under DisturbancesIn American Control Conference (ACC) , 2020



 Active Perception and Control From Temporal Logic SpecificationsIEEE Control Systems Letters (L-CSS), 2019
Active Perception and Control From Temporal Logic SpecificationsIEEE Control Systems Letters (L-CSS), 2019


 Learning Robust Failure Response for Autonomous Vision-Based FlightIn International Conference on Robotics and Automation (ICRA) , 2017
Learning Robust Failure Response for Autonomous Vision-Based FlightIn International Conference on Robotics and Automation (ICRA) , 2017