Certifying Reduced-Order Models
Can we obtain formal guarantees when planning with a reduced-order model?
All models are wrong, but some models are useful. In many robotics applications, rigid-body dynamics are the model of choice. Rigid-body models are fairly accurate for robots like quadrupeds, humanoids, and manipulators, but they are often too complicated to be useful.
This leads roboticists design controllers based on simpler models, especially for legged locomotion.



These reduced-order models capture only a few key features of the dynamics, such as the relationship between foot placement and the center-of-mass. Simplified models underpin much of the success of walking robots in recent years.
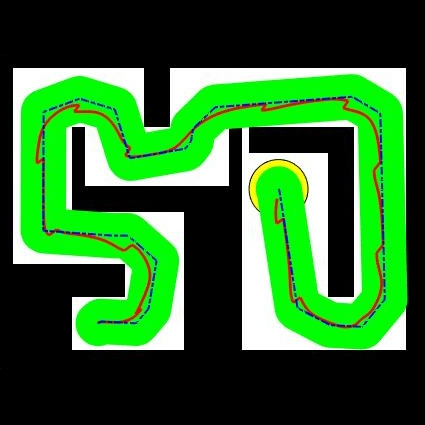
But there is a large gap between these reduced-order models and more complete rigid-body models, not to mention the actual physics of the robot. How can we be sure that a plan generated with a reduced-order model is actually feasible? Can we provide some performance guarantees when we use a reduced-order model?
Related Publications
2022
-
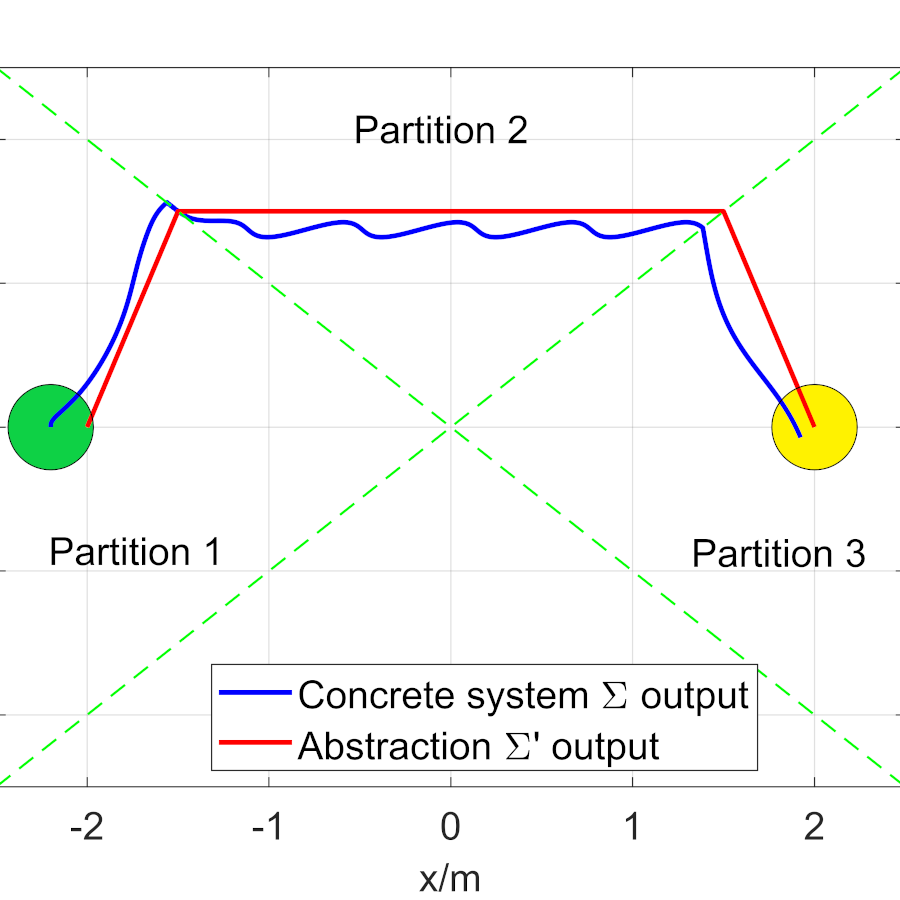 Robust Approximate Simulation for Hierarchical Control of Piecewise Affine Systems under Bounded DisturbancesIn American Control Conference (ACC) , 2022
Robust Approximate Simulation for Hierarchical Control of Piecewise Affine Systems under Bounded DisturbancesIn American Control Conference (ACC) , 2022

2021

2020
-
 Robust Approximate Simulation for Hierarchical Control of Linear Systems under DisturbancesIn American Control Conference (ACC) , 2020
Robust Approximate Simulation for Hierarchical Control of Linear Systems under DisturbancesIn American Control Conference (ACC) , 2020


