Machine Learning
Can we combine the promise of machine learning with the rigor of model-based control?
Deep neural networks have revolutionized computer vision and natural language processing, solving problems that previously seemed intractable. Is robotics next?
It’s possible, but there are a few major hurtles. One is data: unlike computer vision and natural language processing, the internet does not contain vast troves of ready-made robotics data. Collecting new data is slow and expensive, especially if hardware experiments are involved. Another problem is safety. Machine learning methods can perform well, but they don’t generalize outside the training dataset and can sometimes exhibit surprisingly bad behaviors.
One potential solution is to combine machine learning with classical model-based control. Ideally, this can bring together the best of both worlds.




Additionally, there’s good reason to hope that model-based techniques can inspire the next revolution in machine learning for robotics. Contrary to a popular narrative about the “magic” of deep learning, recent breakthroughs in computer vision and natural language processing were enabled by key insights into the structure of the problem. For computer vision, this insight was the importance of convolution. For natural language, it was the concept of attention. What is the key structural insight that will enable machine learning for robotics at scale?
Related Publications
2024
-
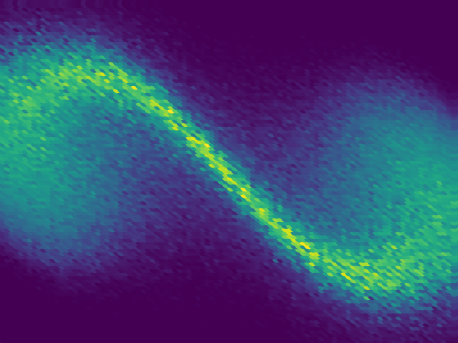 Supervised Learning for Stochastic Optimal ControlIn Conference on Decision and Control (CDC) , 2024
Supervised Learning for Stochastic Optimal ControlIn Conference on Decision and Control (CDC) , 2024

2022
-
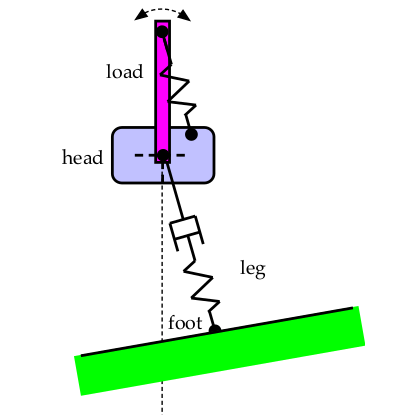 Learning to Control Robot Hopping over Uneven TerrainIn American Control Conference (ACC) , 2022
Learning to Control Robot Hopping over Uneven TerrainIn American Control Conference (ACC) , 2022


2019

2017
-
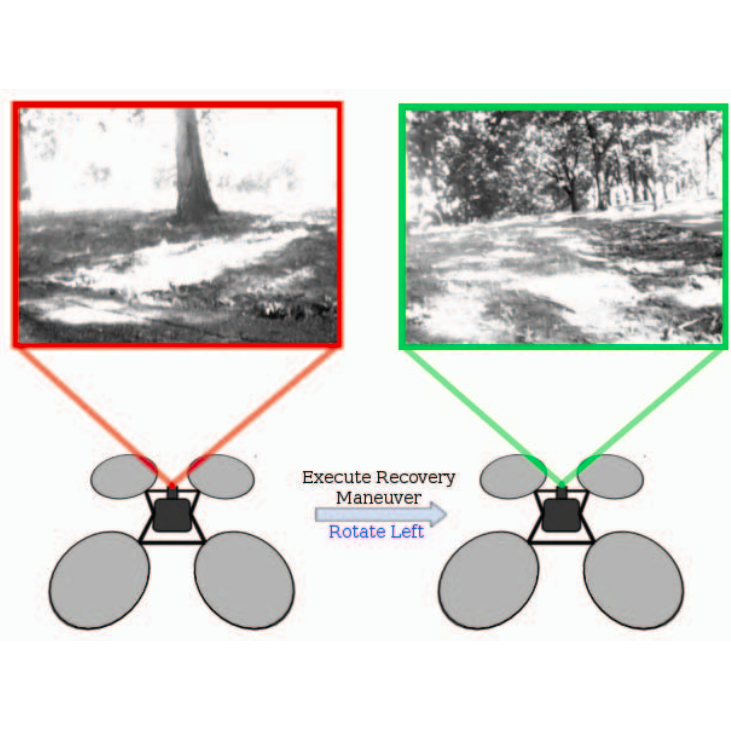 Learning Robust Failure Response for Autonomous Vision-Based FlightIn International Conference on Robotics and Automation (ICRA) , 2017
Learning Robust Failure Response for Autonomous Vision-Based FlightIn International Conference on Robotics and Automation (ICRA) , 2017
